 So, heute erzähle ich mal meine Erfahrungen und Wissenssammlungen mit bzw. über die Slotcars. Bis vor kurzem hatte ich nur Carrera-Autos, meine letzte Errungenschaft ist die Corvette C6R – dann probierte ich mal Autos von Scaleauto, einer spanischen Racingautoschmiede, deren Autos gerne in Clubs gefahren wird. Es gibt auch Bilder in der Galerie von meinen Autos.
So, heute erzähle ich mal meine Erfahrungen und Wissenssammlungen mit bzw. über die Slotcars. Bis vor kurzem hatte ich nur Carrera-Autos, meine letzte Errungenschaft ist die Corvette C6R – dann probierte ich mal Autos von Scaleauto, einer spanischen Racingautoschmiede, deren Autos gerne in Clubs gefahren wird. Es gibt auch Bilder in der Galerie von meinen Autos.
Keine Ahnung, ob’s mit dem Baujahr zusammanhängt oder ob die Autos in der Box besser verarbeitet sind als die in den Grundpackungen, auf jeden Fall fährt die C6R akustisch geschmeidiger mit einem leisen Surren dahin – obwohl ich mal bei allen Autos ein kleines Service gemacht habe (also Gleitlager Ölen, Getriebe Schmieren, Schneuzen, Kammpeln, Striegeln, usw.).
Ich wollt aber trotzdem wissen, wie sich dann so ein „gscheites“ Rennauto anfühlt und habe mich nach einigen Internetrecherchen entschlossen, den Mercedes SLS GT3 und den BMW Z4 GT3 von Scaleauto samt Ortmannreifen (die habe ich auch auf die Carrera-Autos aufgezogen, außer auf die Corvette – da sind Frankenslot druff, aber ich glaube, Ortmann wäre besser….) zu ordern. Die Scaleautos basieren (zumindest in 1:24) auf einem Metallchassis => niedriger Schwerpunkt.
-

- Originalauto

-

- Eingebauter Decoder

-

- Karosserie einstellen
-

- BMW Z4

Desweiteren haben sie vorne+hinten Kugellager, gehärtete Stahlachsen und Alufelgen. D.h., hier ist die Materialauswahl schon was gänzlich anderes als bei den Carreras. Auch die Karosserie ist wesentlich schöner verarbeitet (die kostet alleine ~ 45€).
Nach Erhalt ging es dann auch schon sogleich an den Einbau der Digitaldecoder, denn diese Autos sind eigentlich nur für den Einsatz auf analogen (Club-) Bahnen gedacht (drum ist die Karosserie auch etwas filigraner als die der Carrera-Plastikbomber, da auf den digitalen Systemen die Crashgefahr ungleich höher ist). Nach meinen anfänglichen Problemen des Lötens (naja, ich bin eigentlich kein Elektroniker) ging dann aber der Einbau des Decoders flott vonstatten. Beim SLS konnte ich den Sensor so an der Bodenplatte anbringen, daß er zur Kommunikation mit der Schiene durch einen Schlitz im Chassis durchblicken kann. Beim Z4, der einen kürzeren Radstand hat als der SLS, mußte ich schlußendlich ein Loch weiter aufbohren, damit der Sensor zuverlässig kommunizieren kann. Eh klar, nach dem ersten Test gleich nach dem Einlöten des Decoders funktionierte Alles (Spurenwechsel, Rundenzählung, Pitstop), aber nach dem Komplettzusammenbau (Decoder fixieren, Karosserie anschrauben, Reifen bearbeiten, Auftanken) stellte sich heraus, daß bei Überfahren des Rundensensors mit hoher Geschwindigkeit dieser nicht korrekt arbeitete. Der Z4 machte mir dann auch noch mehr Arbeit, mit der ich aber sowieso gerechnet hatte – denn die Scaleautos gelten, da günstige Racingautos mit Metallchassis (Fertigung angeblich in China), als sehr schlecht zusammengebaut – siehe auch Bilder in der Galerie. Allerdings ist die Qualität der Bauteile sehr gut, sodaß die Empfehlung ist, das Auto gleich nach Erhalt mal neu zu Vermessen (Achsen, Karosserie) und auszubessern. Beim Z4 war z.B. der Achsabstand links/rechts um 0.5mm unterschiedlich, die Karosserie war schief montiert – außerdem habe ich den Radstand um 3mm verlängert, damit die Räder optisch gut in den Radkasten passen. Nur beim Z4 mußte ich auch noch den (sehr starken) Magneten entfernen, dieser hat schon das 2014er-Chassis mit Magnet.
-

- Vermessen des Mercedes

-

- Infrarotdiode

-

- Mercedes SLS GT3

-

- Mercedes auf Schiene

Da dann auch die Rennmotoren eine Nennspannung von 12V haben, das Digital124 aber mit 18V arbeitet, mußte ich die Geschwindigekit auf 40% reduzieren – aber hallo, trotzdem sind diese Autos eine Rakete im Vergleich zu den Carreras …… obwohl, auf meiner Bahn war ich bisher nur max. 0.2-0.3s schneller bei einer Rundenzeit von ~6s. Allerdings fahr ich da eher auf Sicherheit, um die Karosserie zu schonen…..macht trotzdem ’n Heidenspass.
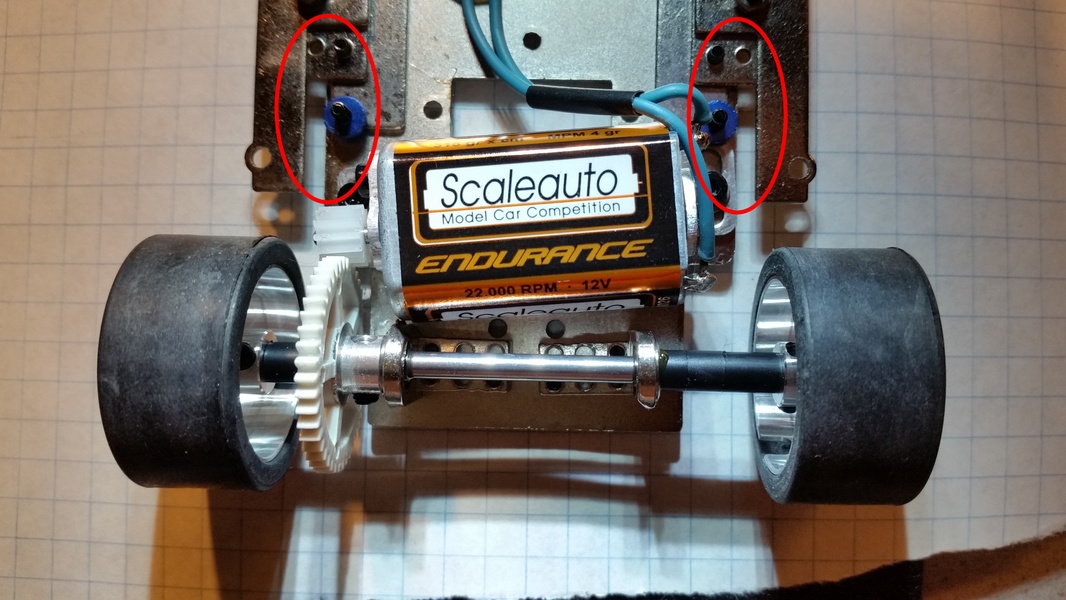
Nochmal kurz zur Erklärung: bei der analogen Bahn wird direkt die Bahnspannung mit dem Handregler gesteuert – drum gehen beim Analogauto die Kabel direkt vom Stromabnehmer zum Motor (siehe Bilder). Beim Digitalsystem liegt immer die max. Spannung an der Bahn, da ja mehrere Autos auf der gleichen Spur fahren können. Der Motor bekommt dann eine per PWM gepulste Gleichspannung.
Bei den Autos fehlt dann noch die LED-Beleuchtung, die werde ich auch noch Nachrüsten, das wird dann das Weihnachtsprojekt werden – aber ich denk, als nächstes kommt ein gscheites Netzteil, da man bei vier Autos auf der Bahn schon recht deutlich den Beschleunigungsverlust bemerkt, da das originale „Spielzeug-“ Netzteil nicht soviel Strom liefern kann. Hm…. man kommt von einem Punkt zum Nächsten und der Rubel rollt …… aber es macht ja Spass, sich ein bisschen in diese Materie reinzudenken.
So, das sind mal in Kürze meine Erfahrungen – ich könnt noch seitenweise Schreiben, aber jetzt mach ich Schluss, ist eh schon ’n langer Beitrag und ich sitz eh schon lang genug vor dem PC-Kasterl.
Anschliessend noch ein paar Daten:
Abstände zur Ermittlung der Decoderposition:
– Abstand Weichensensor bis Weichenanfang: 71-72mm (=> darüber geht auf keinen Fall)
– minimaler Abstand Leitkiel – Sensor: 34mm (auf D132 Autos)
– maximaler Abstand Leitkiel – Sensor: 50mm (=> am besten unter dieser Grenze bleiben)
Angaben zu den Autos:
Breite
Masse: Motorbez: Ortmann: vorne hinten Radstand
Aston Martin DBR9 : 241 gr CL57 18s 81 83 114
Corvette C6R : CR7XD 18k 78 79 111
Audi R8 : 235 gr 18t 80 81 111
Ferrari 599XX : 232 gr CM3M 18y 82 81 116
Porsche GT3 RSR : 204 gr CP3AD 18t 77 81 99
Ford GT40 MKII : 202 gr(+32,5g) 18o 67 73 101
BMW Z4 (SC) : 223 gr SC0026 46s 78 80 106
Mercedes SLS (SC) : 229 gr SC0026 46s 78 82 113
Die Motorspannungen habe ich bei aufgebockter Hinterachse bei voll gedrücktem Regler gemessen, die Bahnspannung beträgt ohne Last 16,9V.
Gemessene Motorspannung (Abstufung lt. PC-Programm Cockpit-XP):
0 = 0%: 7,2V
1 = 7%: 8,2V
2 = 13%: 9,0V
3 = 20%: 9,8V
4 = 27%: 10,8V
5 = 33%: 11,7V
6 = 40%: 12,5V
7 = 47%: 13,5V
8 = 53%: 14,3V
9 = 60%: 15,1V
10 = 67%: 16,0V
11-15 = 73% – 100%: 16,6V – 16,8V
Gemessene Motorspannung (Abstufung lt. Carrera-CU):
30%: 9,2V
40%: 11,6V
50%: 12,4V
60%: 13,3V
80%: 16,4V
100%: 16,8V
LED-Spannung am Decoder:
– Anschluss für vorne: ~3V
– Anschluss für hinten: ~1,9V
Update 26. Dez. 2014:
Obige Spannungen ergeben sich beim originalem Netzteil: Nennspannung 18V, 3A, 54W; Leerlaufspannung 18,3V; Bahnspannung 16,9V
Es war nur eine Frage der Zeit, ein stärkeres Netzteil zu organisieren, da die 3A des Carrera Netzteiles zu wenig für 4 Autos auf der Bahn sind. Das System ist halt ein Spielzeug, und da sind angeblich ca. 54W die Grenze. Die Control Unit (CU) der Bahn verträgt ca. 7-8A. Da mir aber ein geregeltes, stabilisiertes Labornetzteil (derzeit) zu teuer ist, habe ich einfach mal ein PC-Netzteil von HP ausprobiert, und siehe da, es funktioniert tadellos – es (bzw. die CU) hat auch den Kurzschlußtest überstanden. Es sollte auch stabilisiert sein, hat aber eine relativ hohe Leerlaufspannung, jedoch vertragen die Carrera-Motoren angeblich problemlos bis zu 20V.
Technische Daten des Netzteils: 18,5V; 6,5A; 120W
Nach dem Umlöten des Steckers habe ich folgende Spannungen gemessen:
Leerlaufspannung: 19,8V; Bahnspannung: 18,2V
Gemessene Motorspannung (Abstufung lt. PC-Programm Cockpit-XP):
0 = 0%: 8,1V
1 = 7%: 9,1V
2 = 13%: 10,0V
3 = 20%: 10,9V
4 = 27%: 12,0V
5 = 33%: 12,9V
6 = 40%: 13,8V
7 = 47%: 14,9V
8 = 53%: 15,8V
9 = 60%: 16,7V
10 = 67%: 17,7V
11-15 = 73% – 100%: 18,2V – 18,3V
Prinzipiell fahre ich jetzt mit diesem HP-Netzteil mit den Carrera-Autos auf Stufe 10 und mit den Scaleautos auf Stufe 3 und habe keine Einbußen mehr, wenn alle auf die Tube drücken……